My submission to the MICO Challenge
Description of my entry to the MICO challenge (co-located with SaTML) for membership inference that won me the 2nd place on the CIFAR track.
Here I describe my approach to the MICO challenge, co-located with SaTML 2023. Specifically, I walk through my solution for the CIFAR track, which got me the second position on the final leaderboard. I used the same approach for the Purchase100 track as well, but finished fourth. A description of all the winning approaches can be found here.
Let’s start by downloading relevant data from the MICO competition, which can be found here (for CIFAR).
import os
import urllib
from torchvision.datasets.utils import download_and_extract_archive
from sklearn.metrics import roc_curve, roc_auc_score
from mico_competition.scoring import tpr_at_fpr, score, generate_roc, generate_table
from sklearn.metrics import roc_curve, roc_auc_score
import numpy as np
import torch
import csv
import copy
from torch.autograd import Variable
from sklearn import metrics
from tqdm.notebook import tqdm
from torch.distributions import normal
from torch.utils.data import DataLoader, Dataset
from mico_competition import ChallengeDataset, load_cifar10, load_model
from torch.distributions import Categorical
import torch.nn.utils.prune as prune
import pandas as pd
import matplotlib.pyplot as plt
import matplotlib
import torch as ch
import torch.nn as nn
from sklearn.model_selection import train_test_split
from sklearn import preprocessing
from sklearn.inspection import permutation_importance
from sklearn.preprocessing import StandardScaler
from sklearn.pipeline import make_pipeline
from sklearn import tree
from scipy.stats import norm
import autosklearn.classification
import autosklearn.metrics
Features based on target model
Let’s start by collecting features that, for a given target model, only utilize information from that model and any additional data. Later in the post, we will cover features based on utilization of other ‘reference’ model and the problem setup.
The first feature I included is based on the approach described in LiRA, using class-scaled logits instead of direct probabilities.
def get_class_scaled_logits(model, features, labels):
outputs = model(features).detach().cpu().numpy()
num_classes = np.arange(outputs.shape[1])
values = []
for i, output in enumerate(outputs):
label = labels[i].item()
wanted = output[label]
not_wanted = output[np.delete(num_classes, label)]
values.append(wanted - np.max(not_wanted))
return np.array(values)
Next, I use the MERLIN approach to sample neighbors and note variation in model loss. Modification uses log-scale while noting loss differences.
@torch.no_grad()
def relative_log_merlin(model, features, labels):
epsilon = 0.5
small_value = 1e-10
n_neighbors = 50
criterion = torch.nn.CrossEntropyLoss(reduction='none')
noise = normal.Normal(0, epsilon)
diffs = []
base_preds = model(features)
base_losses = criterion(base_preds, labels).cpu().numpy()
base_preds = base_preds.cpu().numpy()
for i, feature in enumerate(features):
neighbors = []
distances = []
for _ in range(n_neighbors):
sampled_noise = noise.sample(feature.shape).to(feature.device)
neighbors.append(feature + sampled_noise)
distances.append(sampled_noise.mean().cpu().item())
neighbors = torch.stack(neighbors, 0)
loss_neighbors = criterion(model(neighbors), labels[i].view(1).repeat(n_neighbors))
loss_change = ch.norm((loss_neighbors - base_losses[i])).item()
# Use relative drop instead of absolute
loss_change /= (small_value + base_losses[i].item())
diffs.append(np.log(loss_change + small_value))
diffs = np.array(diffs)
# Clip at zero (lower side)
diffs[diffs < 0] = 0
return diffs
Next, I perform gradient-descent on the given data (using the training loss) to make modifications to the input. Makes note of change in model loss after gradient ascent, as well as the change in the input itself. My intuition here was that members would have less scope for loss reduction (and consequently smaller changes to the datum itself).
def ascent_recovery(model, features, labels, adv: bool = False):
criterion = torch.nn.CrossEntropyLoss(reduction='none')
n_times = 10
step_size = 0.01 if adv else 0.1 # For normal, use higher
final_losses, final_dist = [], []
for i, (feature, label) in enumerate(zip(features, labels)):
model.zero_grad()
feature_var = Variable(feature.clone().detach(), requires_grad=True)
for j in range(n_times):
feature_var = Variable(feature_var.clone().detach(), requires_grad=True)
loss = criterion(model(ch.unsqueeze(feature_var, 0)), torch.unsqueeze(label, 0))
loss.backward(ch.ones_like(loss), retain_graph=True)
with ch.no_grad():
if adv:
feature_var.data += step_size * feature_var.data
else:
feature_var.data -= step_size * feature_var.data
loss_new = criterion(model(ch.unsqueeze(feature_var, 0)), ch.unsqueeze(label, 0))
# Get reduction in loss
final_losses.append(loss.item() - loss_new.item())
# Get change in data (norm)
final_dist.append(ch.norm(feature_var.data - feature.data).detach().cpu().numpy())
final_losses = np.stack((final_losses, final_dist), 1)
return final_losses.reshape(-1, 2)
Next idea is to “train” model on given data to see how much loss changes. If was with DP, not seen many times (and with clipped gradient), so expected loss decrease would be much more than that for some point that has already been seen multiple times. While at it, I also take note of gradient norms
def extended_epoch(model, features, labels, use_dp: bool = False):
lr = 0.05 # if use_dp else 0.0005
criterion = nn.CrossEntropyLoss(reduction='none')
features_collected = []
# Note losses currently
base_preds = model(features).detach()
base_losses = criterion(base_preds, labels).cpu().numpy()
for i, (feature, label) in enumerate(zip(features, labels)):
# Make copy of model
model_ = copy.deepcopy(model)
model_.train()
model_.cuda()
optimizer = ch.optim.SGD(model_.parameters(), lr=lr, momentum=0)
optimizer.zero_grad()
loss = criterion(model_(ch.unsqueeze(feature, 0)), ch.unsqueeze(label, 0))
loss.backward()
optimizer.step()
# Keep track of gradient norms
gradient_norms = [ch.linalg.norm(x.grad.detach().cpu()).item() for x in model_.parameters()]
# Keep track of updated loss
loss_new = criterion(model_(ch.unsqueeze(feature, 0)), ch.unsqueeze(label, 0)).detach().cpu().numpy()
loss_difference = (base_losses[i] - loss_new).item()
gradient_norms += [loss_difference]
features_collected.append(gradient_norms)
features_collected = np.array(features_collected)
features_collected = features_collected.reshape(features_collected.shape[0], -1)
# Do not care about biases or loss diff
features_collected = features_collected[:, [0, 2, 4]]
# features_collected = np.log(features_collected + 1e-10)
return features_collected.reshape(features_collected.shape[0], -1)
The next feature is inspired by dataset inference. It takes fixed-size steps in random directions (but same random direction) and keep track of how many steps it takes to flip classification. The main idea here is that members/non-members would have different proximity to decision boundaries and thus would have different statistics for this result.
def blind_walk(model, features, labels):
# Track the number of steps taken until decision flips
# Walk no more than 100 steps, and try 10 different random directions
num_directions = 10
num_max_steps = 100
point_of_failure = np.ones((num_directions, features.shape[0])) * np.inf
std = 0.1
for j in range(num_directions):
noise = ch.randn_like(features) * std
for i in range(1, num_max_steps + 1):
new_labels = ch.argmax(model(features + noise * i).detach(), 1)
flipped = np.nonzero((new_labels != labels).cpu().numpy())[0]
point_of_failure[j][flipped] = np.minimum(point_of_failure[j][flipped], i)
point_of_failure = np.clip(point_of_failure, 0, num_max_steps)
point_of_failure = np.mean(point_of_failure, 0)
return point_of_failure.reshape(-1, 1)
Now, we collect all of the features described above. Note that I also include an ‘adv’ variant for gradient-ascent that instead looks to maximize loss instead of minimizing it.
def custom_feature_collection(model, features, labels, use_dp: bool = False):
features_collected = []
features_collected.append(ascent_recovery(model, features, labels))
features_collected.append(ascent_recovery(model, features, labels, adv = True))
features_collected.append(extended_epoch(model, features, labels, use_dp = use_dp))
features_collected.append(relative_log_merlin(model, features, labels).reshape(-1, 1))
features_collected.append(get_class_scaled_logits(model, features, labels).reshape(-1, 1))
features_collected.append(blind_walk(model, features, labels).reshape(-1, 1))
combined_feratures = np.concatenate(features_collected, 1)
return combined_feratures
Features based on reference models
The problem structure and distribution of data (see here) suggests that when looking at a given datapoint, it is more likely to have been a member of another randomly selected model, than not being a member. My intention was to somehow utilize this information in the attack.
To compare these trends with reference models, I took inspiration from the MATT attack, which works by computing gradient alignment between the given model and another reference model. Although the original attack assumes linear models (and cannot work for convolutional layers/deep models), I figured gradient similarity would still be a useful metric to compare models. For any given model, I sample 25 random reference models (out of all 100 train models) and compute gradient similarity between the given model and each reference model.
Below, we compute gradient similarity between the given model and some reference model.
def matt_modified_scores(model, features, labels, model_reference):
criterion = nn.CrossEntropyLoss(reduction='none')
cos = nn.CosineSimilarity(dim=0)
features_collected = []
# Make copy of model
model_ = copy.deepcopy(model)
model_.cuda()
for i, (feature, label) in enumerate(zip(features, labels)):
# Compute gradients with both models
model_.zero_grad()
model_reference.zero_grad()
loss = criterion(model_(ch.unsqueeze(feature, 0)), ch.unsqueeze(label, 0))
loss_ref = criterion(model_reference(ch.unsqueeze(feature, 0)), ch.unsqueeze(label, 0))
loss.backward()
loss_ref.backward()
# Compute product
inner_features = []
for p1, p2 in zip(model_.parameters(), model_reference.parameters()):
term = ch.dot(p1.grad.detach().flatten(), p2.grad.detach().flatten()).item()
inner_features.append(term)
features_collected.append(inner_features)
features_collected = np.array(features_collected)
# Focus only on weight-related parameters
features_collected = features_collected[:, [0, 2, 4, 6]]
return features_collected
To aggregate gradient alignment information across reference models (since the reference models are randomly selected, so cannot compare across models), I compute the range, mean of absolute values, min, and max of the gradient alignment scores.
def extract_features_for_reference_models(reference_features):
num_layers_collected = reference_features.shape[2]
features = []
for i in range(num_layers_collected):
features.append((
np.max(reference_features[:, :, i], 0) - np.min(reference_features[:, :, i], 0),
np.sum(np.abs(reference_features[:, :, i]), 0),
np.min(reference_features[:, :, i], 0),
np.max(reference_features[:, :, i], 0)
))
return np.concatenate(features, 0).T
Let’s start collecting all train models.
def collect_models():
"""
Collect all models from the 'train' set
"""
CHALLENGE = "cifar10"
LEN_TRAINING = 50000
LEN_CHALLENGE = 100
scenarios = os.listdir(CHALLENGE)
dataset = load_cifar10(dataset_dir="/u/as9rw/work/MICO/data")
collected_models = {x:[] for x in scenarios}
phase = "train"
for scenario in tqdm(scenarios, desc="scenario"):
root = os.path.join(CHALLENGE, scenario, phase)
for model_folder in tqdm(sorted(os.listdir(root), key=lambda d: int(d.split('_')[1])), desc="model"):
path = os.path.join(root, model_folder)
challenge_dataset = ChallengeDataset.from_path(path, dataset=dataset, len_training=LEN_TRAINING)
challenge_points = challenge_dataset.get_challenges()
model = load_model('cifar10', path)
collected_models[scenario].append(model)
collected_models[scenario] = np.array(collected_models[scenario], dtype=object)
return collected_models
train_models = collect_models()
Feature vectors are thus a combination of two kinds of features. The first set (originating from matt_modified_scores) uses reference models and reference statistics between a given model and these reference models. The second set of features, originating from custom_feature_collection, does not use any additional reference models.
CHALLENGE = "cifar10"
scenarios = os.listdir(CHALLENGE)
phase = "train"
dataset = load_cifar10(dataset_dir="/u/as9rw/work/MICO/data")
LEN_TRAINING = 50000
LEN_CHALLENGE = 100
X_for_meta, Y_for_meta = {}, {}
num_use_others = 25 # 50 worked best, but too slow
# Check performance of approach on (1, n-1) models from train
for scenario in tqdm(scenarios, desc="scenario"):
use_dp = not scenario.endswith('_inf')
preds_all = []
scores_all = []
root = os.path.join(CHALLENGE, scenario, phase)
all_except = np.arange(100)
for i, model_folder in tqdm(enumerate(sorted(os.listdir(root), key=lambda d: int(d.split('_')[1]))), desc="model", total=100):
path = os.path.join(root, model_folder)
challenge_dataset = ChallengeDataset.from_path(path, dataset=dataset, len_training=LEN_TRAINING)
challenge_points = challenge_dataset.get_challenges()
challenge_dataloader = torch.utils.data.DataLoader(challenge_points, batch_size=2*LEN_CHALLENGE)
features, labels = next(iter(challenge_dataloader))
features, labels = features.cuda(), labels.cuda()
model = load_model('cifar10', path)
model.cuda()
features, labels = features.cuda(), labels.cuda()
# Look at all models except this one
other_models = train_models[scenario][np.delete(all_except, i)]
# Pick random models
other_models = np.random.choice(other_models, num_use_others, replace=False)
other_models = [x.cuda() for x in other_models]
features_collected = np.array([matt_modified_scores(model, features, labels, other_model) for other_model in other_models])
scores = extract_features_for_reference_models(features_collected)
other_features = custom_feature_collection(model, features, labels, use_dp = use_dp)
scores = np.concatenate((scores, other_features), 1)
mem_labels = challenge_dataset.get_solutions()
# Store
preds_all.append(mem_labels)
scores_all.append(scores)
preds_all = np.concatenate(preds_all)
scores_all = np.concatenate(scores_all)
X_for_meta[scenario] = scores_all
Y_for_meta[scenario] = preds_all
Use auto-sklearn (an automl package does does pipeline, optimizer, and hyper-param optimization for you) worked out best, second to using random-forest classifiers.
# Train different meta-classifiers per scenario
CHALLENGE = "cifar10"
scenarios = os.listdir(CHALLENGE)
meta_clfs = {x: autosklearn.classification.AutoSklearnClassifier(memory_limit=64 * 1024, time_left_for_this_task=180, metric=autosklearn.metrics.roc_auc) for ii, x in enumerate(X_for_meta.keys())}
avg = 0
use_all = False
for sc in scenarios:
train_split_og, test_split_og = train_test_split(np.arange(100), test_size=20)
train_split = np.concatenate([np.arange(200) + 200 * i for i in train_split_og])
test_split = np.concatenate([np.arange(200) + 200 * i for i in test_split_og])
if use_all:
X_train = X_for_meta[sc]
X_test = X_for_meta[sc]
y_train = Y_for_meta[sc]
y_test = Y_for_meta[sc]
else:
X_train = X_for_meta[sc][train_split]
X_test = X_for_meta[sc][test_split]
y_train = Y_for_meta[sc][train_split]
y_test = Y_for_meta[sc][test_split]
meta_clfs[sc].fit(X_train, y_train)
preds = meta_clfs[sc].predict_proba(X_test)[:, 1]
preds_train = meta_clfs[sc].predict_proba(X_train)[:, 1]
print(f"{sc} AUC (train): {roc_auc_score(y_train, preds_train)}")
scores = score(y_test, preds)
scores.pop('fpr', None)
scores.pop('tpr', None)
display(pd.DataFrame([scores]))
avg += scores['TPR_FPR_1000']
print("Average score", avg / 3)
For submissions, I set use_all to True (since the autoML classifier already does train-val splits internally). The train-test split above is just for visualization purposes (and to see how well the classifier performs on val data).
Feature Inspection
A closer look (via permutation importance) at the features shows some interesting trends.
from sklearn.inspection import plot_partial_dependence, permutation_importance
labels = []
for i in range(4):
labels.append(f"range_{i+1}")
labels.append(f"abssum_{i+1}")
labels.append(f"min_{i+1}")
labels.append(f"max_{i+1}")
labels.append("ascent_loss")
labels.append("ascent_diff")
labels.append("adv_ascent_loss")
labels.append("adv_ascent_diff")
labels.append("ext_epo_1")
labels.append("ext_epo_2")
labels.append("ext_epo_3")
labels.append("merlin")
labels.append("lira")
labels.append("blindwalk")
scenario = "cifar10_inf"
r = permutation_importance(meta_clfs[scenario], X_for_meta[scenario], Y_for_meta[scenario], n_repeats=10, random_state=0)
sort_idx = r.importances_mean.argsort()[::-1]
plt.boxplot(
r.importances[sort_idx].T, labels=[labels[i] for i in sort_idx]
)
plt.xticks(rotation=90)
plt.tight_layout()
plt.show()
for i in sort_idx[::-1]:
print(
f"[{i}] {labels[i]:10s}: {r.importances_mean[i]:.3f} +/- "
f"{r.importances_std[i]:.3f}"
)
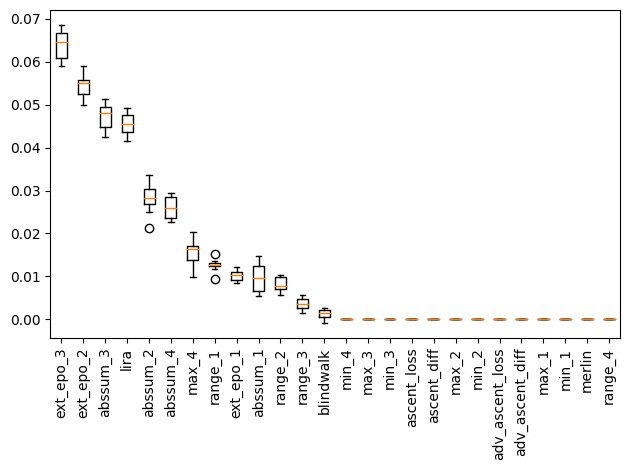
The abs-sum and range of gradient alignment values across reference models seem to be most useful. Features like LiRA and gradient norms in the extended-epoch simulation also seem to be important for the case of no DP.
...
[20] ext_epo_1 : 0.010 +/- 0.001
[0] range_1 : 0.013 +/- 0.001
[15] max_4 : 0.016 +/- 0.003
[13] abssum_4 : 0.026 +/- 0.003
[5] abssum_2 : 0.028 +/- 0.003
[24] lira : 0.045 +/- 0.002
[9] abssum_3 : 0.047 +/- 0.003
[21] ext_epo_2 : 0.054 +/- 0.003
[22] ext_epo_3 : 0.064 +/- 0.003
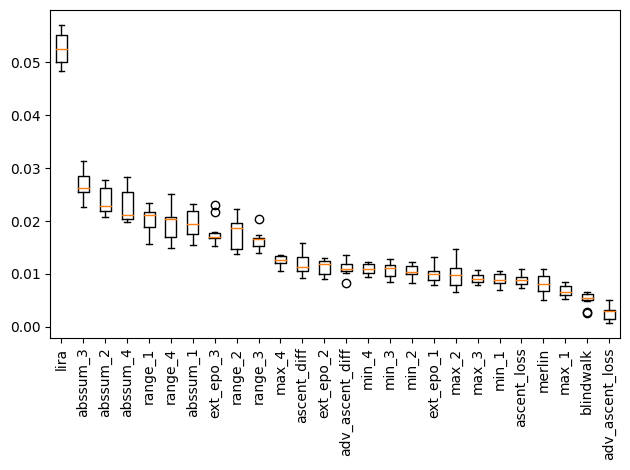
However, the same trend does not hold when looking at models with DP.
...
[22] ext_epo_3 : 0.018 +/- 0.002
[1] abssum_1 : 0.020 +/- 0.003
[12] range_4 : 0.020 +/- 0.003
[0] range_1 : 0.020 +/- 0.002
[13] abssum_4 : 0.023 +/- 0.003
[5] abssum_2 : 0.024 +/- 0.003
[9] abssum_3 : 0.027 +/- 0.002
[24] lira : 0.053 +/- 0.003
In this case, most of the classifier’s performance seems to originate from LiRA, followed by features extracted from reference models. However, features like the one extracted from the extended-epoch simulation seem to be less somewhat important - in fact, more than they are in the case of no DP.
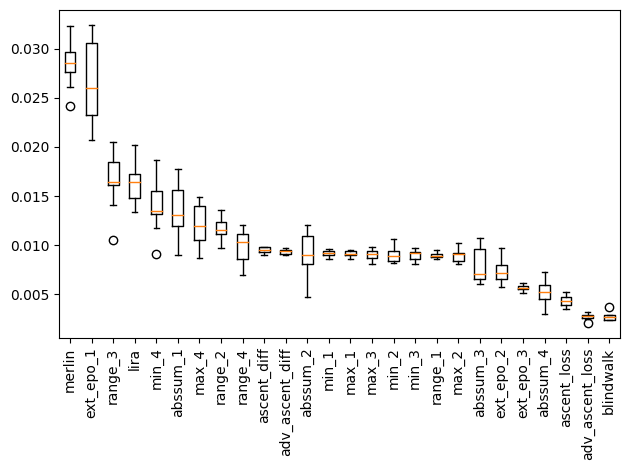
Interestingly, for the case of low-$\epsilon$ DP, merlin-based features turn out to be the most important.
...
[15] max_4 : 0.012 +/- 0.002
[1] abssum_1 : 0.014 +/- 0.003
[14] min_4 : 0.014 +/- 0.002
[24] lira : 0.016 +/- 0.002
[8] range_3 : 0.017 +/- 0.003
[20] ext_epo_1 : 0.027 +/- 0.004
[23] merlin : 0.028 +/- 0.002
The utility of each of these features, though, is significantly lower than scenarios with higher-$\epsilon$ DP, or no DP at all. This is understandable, since the DP is very much intended to reduce membership inference risk. However, it is interesting that the relative utility of features is not same across the scenarios, further showing why having individual meta-classifiers for the scenarios is useful.
Next, we collect features for all models across scenarios and phases. Helps to re-use features when experiment with different meta-classifiers. No need to re-run for ‘train’ models, since we already have features for those.
CHALLENGE = "cifar10"
LEN_TRAINING = 50000
LEN_CHALLENGE = 100
scenarios = os.listdir(CHALLENGE)
phases = ['dev', 'final']
stored_features = {}
dataset = load_cifar10(dataset_dir="/u/as9rw/work/MICO/data")
for i, scenario in tqdm(enumerate(scenarios), desc="scenario", total=3):
use_dp = not scenario.endswith('_inf')
stored_features[scenario] = {}
for phase in tqdm(phases, desc="phase"):
stored_features[scenario][phase] = []
root = os.path.join(CHALLENGE, scenario, phase)
all_except = np.arange(100)
for j, model_folder in tqdm(enumerate(sorted(os.listdir(root), key=lambda d: int(d.split('_')[1]))), desc="model", total=len(os.listdir(root))):
path = os.path.join(root, model_folder)
challenge_dataset = ChallengeDataset.from_path(path, dataset=dataset, len_training=LEN_TRAINING)
challenge_points = challenge_dataset.get_challenges()
model = load_model('cifar10', path)
challenge_dataloader = torch.utils.data.DataLoader(challenge_points, batch_size=2*LEN_CHALLENGE)
features, labels = next(iter(challenge_dataloader))
model.cuda()
features, labels = features.cuda(), labels.cuda()
# Look at all models except this one
other_models = train_models[scenario][np.delete(all_except, j)]
other_models = np.random.choice(other_models, num_use_others, replace=False)
features_collected = np.array([matt_modified_scores(model, features, labels, other_model.cuda()) for other_model in other_models])
scores = extract_features_for_reference_models(features_collected)
other_features = custom_feature_collection(model, features, labels, use_dp=use_dp)
processed_features = np.concatenate((scores, other_features), 1)
stored_features[scenario][phase].append(processed_features)
Time to generate predictions!
CHALLENGE = "cifar10"
LEN_TRAINING = 50000
LEN_CHALLENGE = 100
scenarios = os.listdir(CHALLENGE)
phases = ['dev', 'final']
dataset = load_cifar10(dataset_dir="/u/as9rw/work/MICO/data")
for i, scenario in tqdm(enumerate(scenarios), desc="scenario", total=3):
for phase in tqdm(phases, desc="phase"):
root = os.path.join(CHALLENGE, scenario, phase)
j = 0
for model_folder in tqdm(sorted(os.listdir(root), key=lambda d: int(d.split('_')[1])), desc="model"):
path = os.path.join(root, model_folder)
features_use = stored_features[scenario][phase][j]
# Using scenario-wise meta-classifier
predictions = meta_clfs[scenario].predict_proba(features_use)[:, 1]
j += 1
assert np.all((0 <= predictions) & (predictions <= 1))
with open(os.path.join(path, "prediction.csv"), "w") as f:
csv.writer(f).writerow(predictions)
Packaging the submission: now we can store the predictions into a zip file, which you can submit to CodaLab.
import zipfile
phases = ['dev', 'final']
experiment_name = "final_submission"
with zipfile.ZipFile(f"submissions_cifar/{experiment_name}.zip", 'w') as zipf:
for scenario in tqdm(scenarios, desc="scenario"):
for phase in tqdm(phases, desc="phase"):
root = os.path.join(CHALLENGE, scenario, phase)
for model_folder in tqdm(sorted(os.listdir(root), key=lambda d: int(d.split('_')[1])), desc="model"):
path = os.path.join(root, model_folder)
file = os.path.join(path, "prediction.csv")
if os.path.exists(file):
zipf.write(file)
else:
raise FileNotFoundError(f"`prediction.csv` not found in {path}. You need to provide predictions for all challenges")
Takeaways
This was my first stint with actively developing and launching a membership inference attack, and I definitely learned a lot! I can now see that membership inference is hard, even when access to a highly-overlapping dataset (and models trained on similar data) are provided. I also learned that while using observation-based features directly (such as LiRA, scaled to the $[0, 1]$ scale) is commonpractice in MI literature, switching to better classifiers than linear regression (better yet- automating the entire model pipeline) can give non-trivial boosts in performance. I hope this post was helpful to you, and I’d love to hear your thoughts and feedback!
My solutions (for both CIFAR and Purchase100) are available here: https://github.com/iamgroot42/MICO